
Кластеризація країв
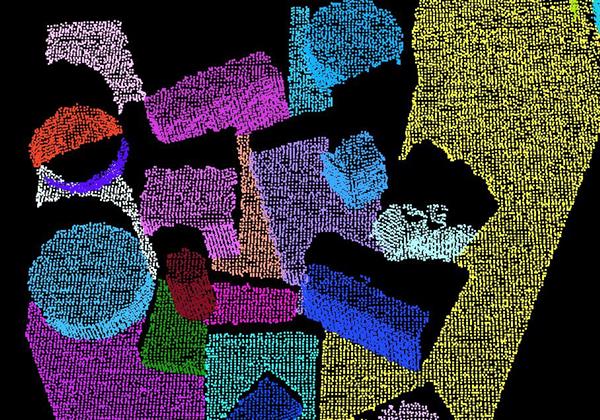
Виявлення країв для виділення певних деталей із складного зображення. Як тільки система знаходить частина, вона використовує дані, зібрані з візуальної інформації, для зміни своєї програми і виконання завдань за призначенням. Це дозволяє роботові працювати з деталями, які зміщені, нахилені, перемішані в контейнері або іншим чином виведені з розрахункового положення. Щоб використовувати систему бачення таким чином, повинна бути певна форма калібрування, де робот може пов’язувати візуальні дані з відстанню. Ці властивості застосовуються в системах технічного зору для контролю якості.
При використанні 2D-зору або однієї камери, вона повинна перебувати в одному і тому ж положенні кожен раз, коли потрібно знайти зображення і відстані від цієї точки, тобто повинна бути якась форма калібрування. При об’ємному баченні дві камери або зображення з двох місць визначають відстань.
3D-система також вимагає калібрування, а у випадку двох камер розташування камер відносно один одного, що є частиною калібрування. 3D-система технічного зору ds1000 може вимірювати функції деталей на микроном рівні, забезпечуючи якість кожної деталі під час роботи. Системи бачення «все в одному», які підключаються безпосередньо до робота і обробляють всю обробку даних, не є чимось новим для ринку робототехніки.
Наприклад, CMUcam5 Pixy — це все в одній системі бачення, яка працює з Arduino, Raspberry Pi і BeagleBone для розпізнавання кольору, об’єктів і розпізнаванням обличчя на цьому шляху. Раніше для забезпечення цієї функціональності для хобі-роботів знадобилося або велику кількість роботи, або дорога система, але Pixy спростив надання можливостей системи технічного зору мобільного робота.
