
Перетворення координат
При розробці систем технічного зору враховують, що робот повинен відрегулювати себе у відповідності з орієнтацією деталей, схопити предмети з конвеєра, а потім укласти їх на палети. У цьому випадку датчики зору забезпечують зв’язок між випадково орієнтованої частиною і роботом. Наприклад, система машинного зору може бути застосована для управління роботами на машині для складання електронних друкованих плат.
Інший поширений клас додатків складається з роботів, які в процесі виробництва передають деталі з однієї на наступну операцію. Система бачення надає інформацію, яка дозволяє роботам захоплювати цільовий об’єкт і переміщати його на наступну операцію у виробничій або інспекційної системі.
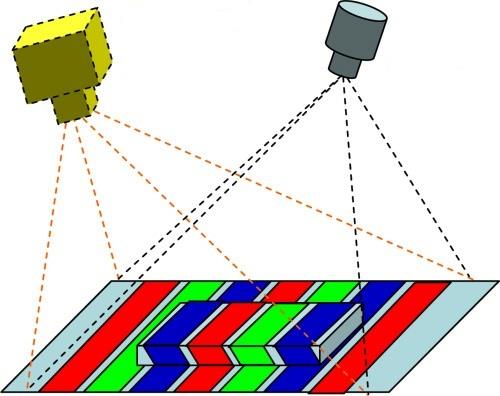
Коли камера машинного зору виявить у полі зору об’єкт, камера знаходить і встановлює координати x і y об’єкта відносно верхнього лівого кута зображення – 0, 0 точки. Робот функціонує з власною системою координат, зосередженої на власній 0-й точці, що зазвичай не відповідає тій, яку використовує система бачення. Щоб спростити зв’язок між датчиком зору і роботом і дозволити роботу легко виконувати правильне дію, системи бачення перетворюють координати робота. Завдяки цій можливості вона перетворює інформацію про місцезнаходження точки інтересу в системі відліку камери в систему координат пристрою систем технічного зору.
На додаток до координат положення x і y системи часто повинні повідомляти роботам тета-координату 0 або кут повороту цільового об’єкта. Включення координати 0 дозволяє роботам визначати, де знаходиться ця частина, а також мати можливість її підняти. Інструменти Vision можуть повідомляти про позиції об’єкта і про те, як він обертається, тому робот може відрегулювати себе відповідним чином, перш ніж підняти об’єкт і виконати завдання.
Координати x, y і 0 певної частини можуть бути встановлені з використанням різних інструментів бачення, які є частиною програмних компонентів системи бачення. Точність, доступна в цих інструментах, розрізняється, як і час, необхідний для аналізу цікавить точки. Наприклад, інструменти надають координати x і y для випадків, коли ребро знаходиться на продукті. У системі технічного зору в робототехніці, якщо кілька інструментів виявлення краю об’єднані з інструментом аналізу, можна визначити кут або координату 0.
