
Процесорний компонент
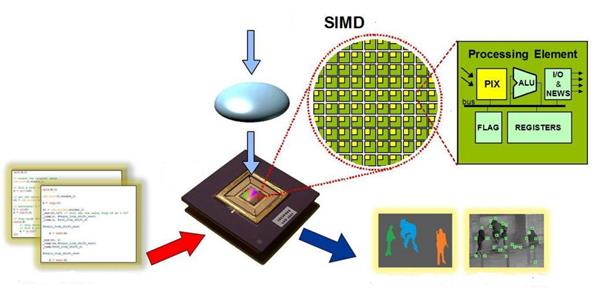
Це наступний основний компонент системи бачення. Процесор перетворить всі необроблені дані з камери в корисну інформацію для робота. Існує два основних методи обробки інформації з точки зору виявлення та кластеризації.
При виявленні кромок процесор шукає різкі відмінності в світлових даних від камери, які потім розглядає край. Як тільки він знаходить перевагу, процесор дивиться на дані з пікселів поблизу, щоб побачити, де ще він може знайти аналогічну різницю. Цей процес продовжується до тих пір, поки не знайде задану контурну інформацію для зображення.
При кластеризації процесор знаходить пікселі, які мають ідентичні дані, а потім шукає інші пікселі поруч з однаковими або близькими до них даними. Цей процес створює зображення, використовуючи дані, зняті камерою. Як тільки процесор визначити його, як зображення, він форматує інформацію у щось, що робот може використовувати, і відправляє в систему.
Остання ключова частина технічного зору в системах управління мобільними об’єктами — кабельна розводка. У більш ранніх технологіях кабелі зв’язку, які використовуються для систем відеоспостереження, були незручними і обмеженими в тому, як далеко вони могли відправляти дані без втрат.
Приблизно в 2009 році Adimec розробив новий спосіб надсилання даних, які дозволили передавати більше 6 Гбіт/с по коаксіальному кабелю, і назвав його CoaXPress. Цей протокол і ті, які були випущені пізніше, забезпечили використання одного коаксіального кабелю для передачі даних, незважаючи на те, що обсяг даних, які потрібні для передачі, продовжує зростати.
Не всі системи бачення використовують тільки один коаксіальний кабель для передачі даних, тому важливо, щоб ті, хто працює з системами бачення, розуміли специфіку та обмеження системи, які у них є.
